|
|
|
Beobachtungen mit KMOS
Beobachtungsvorbereitung
Wie für jedes andere VLT-Instrument müssen auch die Beobachtungen mit KMOS im voraus vom Astronomen vorbereitet werden. Aufgrund der Erfordernisse eines Multi-Objekt-Spektrometers im Allgemeinen und der speziellen Eigenschaften von KMOS im Besonderen gibt es dabei einige zusätzliche Nebenbedingungen zu beachten: Um die zur Verfügung stehende Beobachtungszeit maximal auszunutzen, müssen möglichst viele der 24 Arme gleichzeitig auf zu beobachtenden Zielobjekten positioniert werden, wobei deren Prioritäten, der endliche Schwenkbereich der Arme, mögliche Armkollisionen sowie Abschattungseffekte zu berücksichtigen sind. Zusätzlich muss vermieden werden, dass für eine spezielle Konfiguration durch die Reflexion des Lichts sehr heller Sterne an den metallisierten Arm-Oberflächen unerwünschtes Streulicht entsteht.
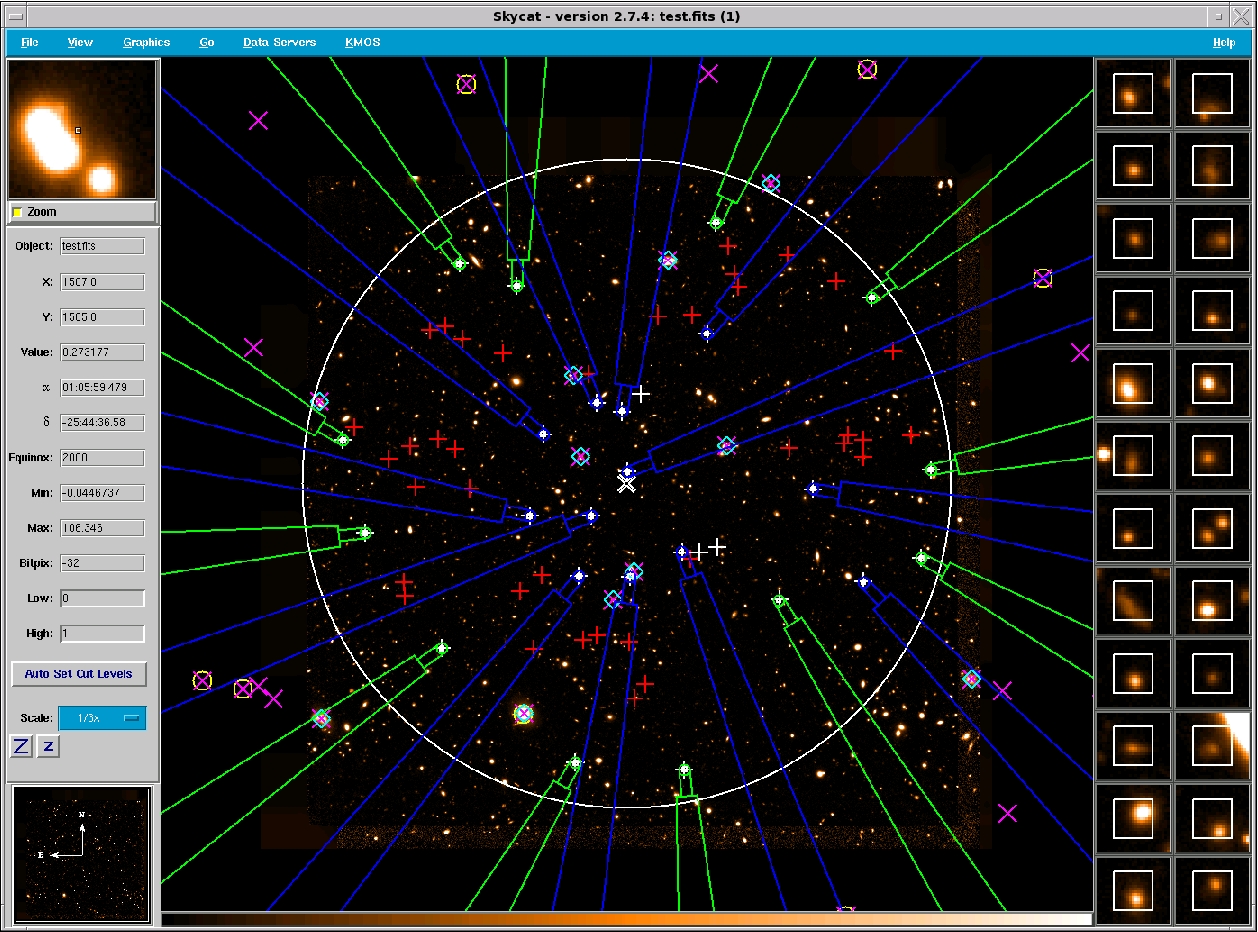
Aus diesen Gründen wurde eine spezielle Vorbereitungs-Software KARMA (KMOS ARM Allokation) entworfen, die die 24 Arme weitestgehend automatisch und dabei so effizient wie möglich auf die zu beobachtenden Objekte verteilt. Als Erweiterungs-Modul für die weitverbreitete Astronomie-Software Skycat bietet KARMA alle dort bereits vorhandenen Bildverarbeitungs- und Katalogfunktionen. Zusätzlich dazu und anhand eines vorher zu ladenden Hintergrundbildes kann die KMOS-Arm-Konfiguration sowohl automatisch als auch manuell vorgenommen werden. Eine Momentaufnahme ist im Bild unten zu sehen.
|
| Maximale Ausbeute: Momentaufnahme des Vorbereitungs-Tools KARMA. Alle 24 Arme sind in diesem Fall Objekten aus dem FORS Deep Field zugeordnet. Arme der oberen Ebene sind grün, die der unteren Ebene blau dargestellt. Die quadratischen Felder am rechten Bildrand zeigen den Bereich (2.8"x2.8"), der jeweils von einer IFU abgedeckt wird. |
Beobachtungs-Modi
Ein Charakteristikum jedes Infrarot-Instruments ist es, dass das vom Beobachtungsobjekt kommende Nutzsignal durch den thermischen Himmelshintergrund deutlich dominiert wird. Letzterer muss deshalb während der Beobachtung ständig mit aufgenommen werden, um eine spätere genaue Trennung der beiden Anteile in der Datenreduktion zu ermöglichen. KMOS stellt mehrere solcher Möglichkeiten zur Verfügung, denen zwei verschiedene Beobachtungs-Modi entsprechen:
|
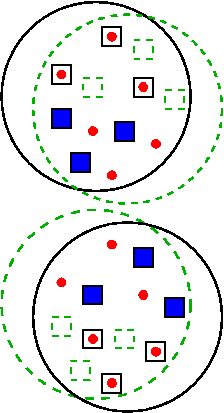
"Nod to Sky"-Modus In diesem Modus wird das Hintergrundsignal durch fortgesetztes Hin- und Herbewegen des Teleskops ("nodding"/"Nicken") und/oder Drehen des Instruments zwischen zwei vorher festgelegten Positionen vom selben Arm gewonnen, der auch die Spektren des eigentlichen Beobachtungsobjekts liefert. Im Bild links schwarz bzw. grün dargestellt. Deshalb wechselt jeder Arm (IFU-Felder durch schwarze Quadrate angedeutet) zwischen einem eigentlichen Beobachtungsobjekt (roter Punkt) und einer zugehörigen Himmelshintergrund-Position (blaues Quadrat). Letztere muss während der Vorbereitung geeignet bestimmt werden. Die Bewegung wird dabei ausschließlich vom Teleskop und/oder Instrument ausgeführt, die Arme bleiben in ihrer einmal eingestellten Position. Da sich nur in seltenen Fällen alle 24 Arme gleichzeitig auf wissenschaftlichen Zielobjekten positionieren lassen, können letztere zur Steigerung der Beobachtungseffizienz in beiden Teleskop- /Instrumentpositionen allokiert werden, so dass schlussendlich zwei Teilmengen von Armen konfiguriert sind, die alternierend einmal auf das Zielobjekt und einmal auf Himmel zeigen. Man vergleiche dazu die im Bild links oben und unten dargestellten Positionen. |
|
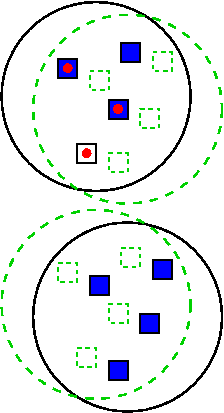
"Stare"-Modus Charakteristisch für diesen Modus ist, dass das Teleskop immer auf die selbe Stelle am Himmel zeigt ("stares"/"starrt") und der Drehwinkel des Instruments unverändert bleibt (Bild links oben). Der Himmelshintergrund wird in diesem Fall von während der Vorbereitung eigens platzierten Himmels-Armen aufgenommen, die für die Dauer der Beobachtung an dieser Position verbleiben. Alle auf wissenschaftlichen Zielobjekten befindlichen Arme können allerdings zusätzlich zur Hintergrundbestimmung herangezogen werden, sofern sie eine ausreichende Anzahl von "leeren", also auf blankem Himmel befindlichen Pixeln, abdecken. Eine Himmelsposition, in der alle Arme auf Hintergrund gesetzt sind, muss zwar zusätzlich bestimmt werden, die zugehörige Belichtung ist aber nur einmal erforderlich und kann zu einem beliebigen Zeitpunkt erfolgen (Bild links unten). |
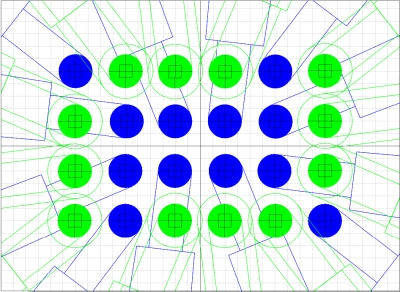
Ein zusätzlicher Beobachtungsmodus, der sogenannte "Mosaik-Modus", dient speziell der Spektroskopie größerer zusammenhängender Flächen. Zu diesem Zweck werden alle 24 Arme in eine vordefinierte Position (Bild unten) gebracht und anschließend nur noch das Telskop bewegt, so dass durch systematisches und schrittweises "Lückenschließen" ein Bereich von ca. 64x43 Bogensekunden abgedeckt werden kann.
|
Kein Brettspiel: Die Arm-Konfiguration für den "Mosaik"-Modus. Durch jeweils 4 horizontale und vertikale Verschiebungen des Teleskops kann ein zusammenhängendes rechteckiges Feld abgedeckt werden. |
Zuletzt geändert: 2022-07-06 (Michael Wegner)