|
|
|
Das Instrument
Grundlegende Parameter
Aus den wissenschaftlichen Anforderungen an KMOS ergeben sich im Einzelnen die folgenden technischen Spezifikationen:
| Parameter | Spezifikation |
|---|---|
| Optische Durchlässigkeit | J > 20%, H > 30%, K > 30% |
| Wellenlängenbereich | 1,0 ... 2,5μm |
| Spektrale Auflösung | R~3400,3800,3800 (J,H,K) |
| Anzahl IFUs | 24 |
| erfasste Fläche pro IFU | 2,8x2,8 Bogensekunden |
| Räumliche Auflösung | 0,2 Bogensekunden |
| Durchmesser Gesichtsfeld | 7,2 Bogenminuten |
| Packungsdichte IFUs | >= 3 innerhalb 1 Bogenminute2 |
| Mindestabstand IFUs | 6 Bogensekunden Kante-Kante |
Zur Umsetzung dieser Anforderungen wurde ein modularer Ansatz gewählt, der die Funktionalität des Gesamtinstruments in drei im wesentlichen identische Sektoren aufteilt, von denen jeder ein Drittel der im Folgenden beschriebenen Komponenten enthält.
Pick-Off-Arme
|
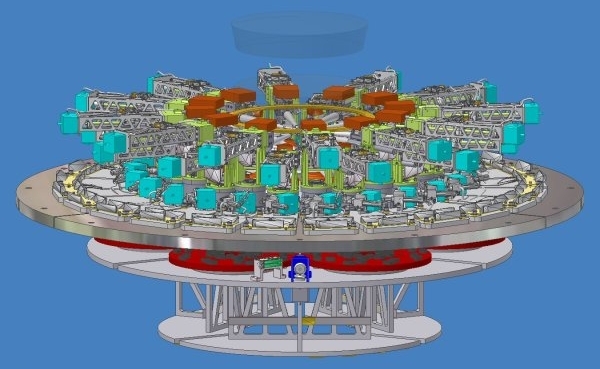
Das Pick-Off-Modul: 24 Roboterarme sind in zwei Ebenen konzentrisch um das kreisförmige Gesichtsfeld angeordnet. |
Kernstück von KMOS ist das sogenannte Pick-Off-Modul mit 24 Roboterarmen, die konzentrisch um ein rundes Gesichtsfeld von 25cm Durchmesser angeordnet sind (entsprechend einem Feld von 7,2 Bogenminten Durchmesser am Himmel). Angetrieben von jeweils 2 Schrittmotoren, können diese Arme radiale Bewegungen bis zur Feldmitte sowie Drehbewegungen von +/- 11° um ihre Ruheposition ausführen und decken dabei gemeinsam das gesamte Gesichtsfeld ab. Um ihre Bewegungsfreiheit zu verbessern, sind die Arme über 2 Ebenen - jeweils 12 oberhalb und unterhalb der Fokalebene - verteilt. Im Fall, dass trotz softwareseitiger Zulässigkeits-Überprüfungen zwei Arme kollidieren, sorgt ein elektronischer Sensor für den sofortigen Stop aller Bewegungen.
Mit Hilfe eines kleinen Spiegels an der Spitze kann jeder Arm gerade das quadratische 2.8''x2.8'' Feld aus dem Gesichtsfeld herausgreifen, das anschließend in 14x14 Spektren zerlegt wird. Die Auswahl des Spektralbands erfolgt mit 3 identischen Filterrädern unter der Grundplatte des Pick-Off-Moduls. Eine Kalibrations-Einheit ermöglicht für jeden Arm an einer vordefinierten Position außerdem die Eichung der optischen Komponenten mit Hilfe von Licht bekannter Wellenlänge.
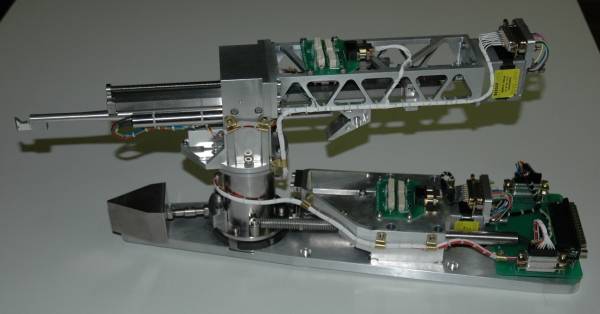
Ein Prototyp eines Pick-Off-Arms wurde bereits angefertigt:
|
1 aus 24: Prototyp eines Pick-Off-Roboterarms. |
IFU-Modul
Entsprechend dem Prinzip der 3D-Spektroskopie sammeln 3 identische IFU-Systeme das Licht von jeweils 8 Pick-Off-Armen, zerlegen es in 8x14 Streifen (jeder der Streifen enthält wiederum 14 Pixel) und ordnen es jeweils zu einem 254mm langen Pseudo-Spalt, dessen Licht schließlich einem von 3 identischen Spektrographen zugeführt wird.
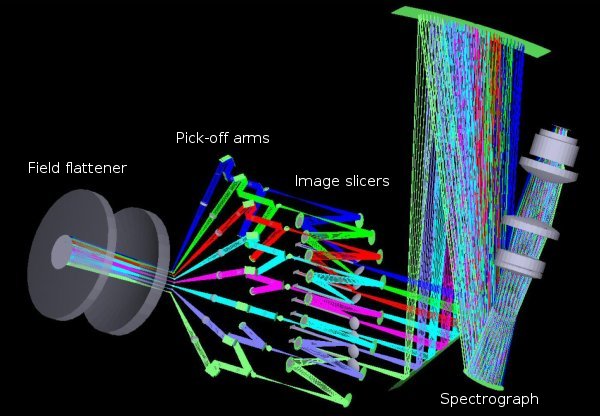
Im Bild unten ist der Lichtweg für 8 ausgewählte Einzelfelder von der Eintrittslinse (die gleichzeitig die Nichtplanarität der Fokalfläche ausgleicht, links) über die Optik der Pick-Off-Arme und die Zerlegungsspiegel der IFU (Mitte) bis zum Spektrographen (rechts) dargestellt. Letzterer "sieht" nur noch die linear hintereinander angeordneten 8x14 Bildscheiben aller 8 Arme, so, als käme das Licht aus einem langen Spalt.
|
Vom Bild zum Spektrum: Modell des Lichtwegs für die von 8 Armen aus dem Gesichtsfeld herausgegriffenen Strahlenbündel. |
Spektrograph
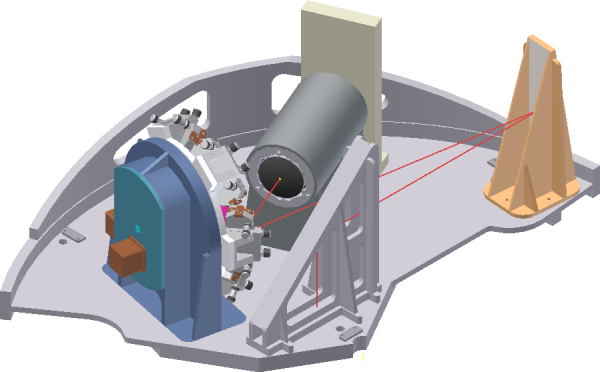
Dem dreigeteilten modularen Aufbau von KMOS entsprechend erfolgt die Spektralzerlegung des von den IFU-Einheiten einfallenden Lichtes in 3 identischen Spektrographen. Jeder ist mit einem Umlenk- und einem Kollimatorspiegel, einem 6-Positionen-Rad zur Auswahl des Beugungsgitters und einer Spektrographen-Kamera ausgestattet. Letztere enthält den 2048x2048 Hawaii-2RG HGCdTe Infrarot-Detektor, dessen Position über Stellmotoren justierbar ist.
|
Am Ende: Einer von 3 identischen Spektrographen mit dem Auswahlrad für die Beugungsgitter (links) und der Kamera mit Infrarot-Detektor (Mitte). Die rote Linie deutet den Lichtweg an. |
Kryostat
Die Besonderheiten der Infrarot-Spektroskopie erfordern es, dass KMOS im Vakuum betrieben und auf -140°C (der Infrarot-Detektor sogar auf -200°C) gekühlt wird. Die Mehrzahl der Komponenten mit Ausnahme der Steuerungselektronik befindet sich deshalb in einem evakuierten Kryostat (siehe Haupseite). Die Gesamtmasse dieses Moduls wird ca. 3000kg erreichen.
Elektronik
Die über 60 Schrittmotoren in kryogener Umgebung für Pick-Off-Arme, Filter- und Beugungsgitter-Rad sowie die Kalibrationslampen, Temperatursensoren etc. erfordern eine umfangreiche Steuerungselektronik, die in 3 Local Control Units (LCUs) außerhalb des Instruments untergebracht ist. Ein spezieller Kollisionsdetektor sorgt außerdem dafür, dass alle Armbewegungen bei Kontakt zweier Arme über ihre metallbeschichteten leitenden Oberflächen sofort zum Stillstand kommen.
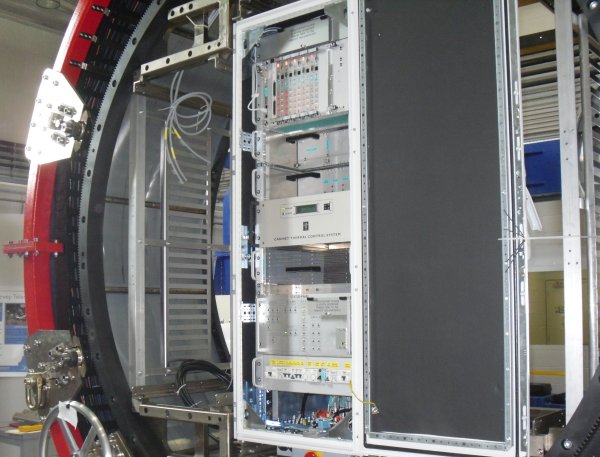
|
Alles unter Kontrolle: Einer von drei Kontrollelektronik-Schaltschränken, eingebaut in den Kabel-Korotator. |
Software
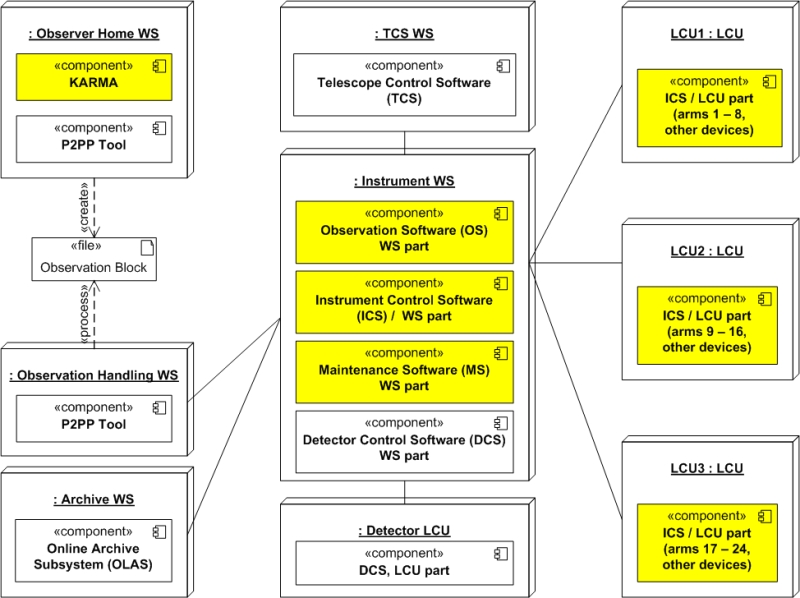
Wie jedes andere VLT-Instrument nutzt auch KMOS eine standardisierte Software-Infrastruktur, die über mehrere Workstations (WSs) und Local Control Units (LCUs) verteilt ist (Bild).
|
|
Etwas unübersichtlich: Die Verteilung der verschiedenen Software-Komponenten auf Hardware-Knoten innerhalb des vorgegebenen Rahmens der VLT-Software. Die für KMOS zu neu zu entwickelnden bzw. zu modifizierenden Komponenten sind gelb dargestellt. |
Die instrumentenspezifische Software innerhalb dieses Rahmens gliedert sich dann in mehrere Standard-Module, von denen die folgenden and die speziellen Erfordernisse von KMOS angepasst werden müssen:
- Die Instrument Control Software (ICS), bestehend aus einem Workstation- und einem LCU-Teil, steuert alle zum Instrument gehörenden Hardware-Geräte, insbesondere die Pick-Off-Arme.
- Die Observation Software (OS) koordiniert die Ausführung einer Beobachtung, interagiert mit der Instrumenten-Hardware aber nicht direkt. Zusätzlich bietet die OS eine Schnittstelle zum Archivierungssystem für die Beobachtungsdaten an. Die grundlegende, von der OS zu verarbeitende Einheit ist der Observation Block, der alle für eine vollständige Beobachtung notwendigen Parameter enthält. Die unterschiedlichen Abläufe werden dabei von sogenannten Templates gesteuert.
- Mit der Maintenace Software (MS) wird die Software-Steuerung für Kalibrations- und Testoperationen zur Verfügung gestellt.
- Die Observer Support Software (OSS) schließlich ermöglicht die Beobachtungsvorbereitung durch Einstellung aller instrumentenspezifischen Konfigurationsparameter. Im Fall von KMOS dient dazu vor allem das KARMA-Tool, das den Astronomen bei der Zuordnung von Armen zu wissenschaftlichen Zielobjekten unterstützt. Das Standard-ESO-P2PP-Tool (Phase 2 Proposal Preparation) ist zusätzlich Bestandteil der OSS und ermöglicht die Einstellung allgemeiner Parameter wie Belichtungszeiten, Spektralband etc.
Den Standards der allgemeinen VLT-Software entsprechend, wird der überwiegende Teil der Software in C++ bzw. C (Teile der ICS) implementiert, die Graphischen Benutzerschnittstellen sowie die Templates aber mit Hilfe der Skriptsprache Tcl/Tk.
Zusätzlich zur Instrumenten-Software (entwickelt an der Universitätssternwarte) wird eine spezielle Datenreduktions-Software (entwickelt am MPE) dafür sorgen, dass die pro Beobachtungsnacht anfallenden 5 GB Daten angemessen verarbeitet werden.
Zuletzt geändert: 2022-07-06 (Michael Wegner)