|
|
|
Observations with KMOS
Preparation
As for any instrument in operation at VLT the astronomer has to prepare observations with KMOS in advance. Due to the special nature of a multi-object spectrometer in general and the specific KMOS features in particular some additional constraints apply: To get the maximum benefit from the granted observation time it is especially crucial to allocate as many targets as possible to the 24 pick-off arms, thereby taking the target priorities, restricted arm travel ranges, possible arm collisions and shadowing effects into account. In addition, it shall be avoided that any arm will be hit by field objects brighter than a certain limiting magnitude and thus creating stray light.
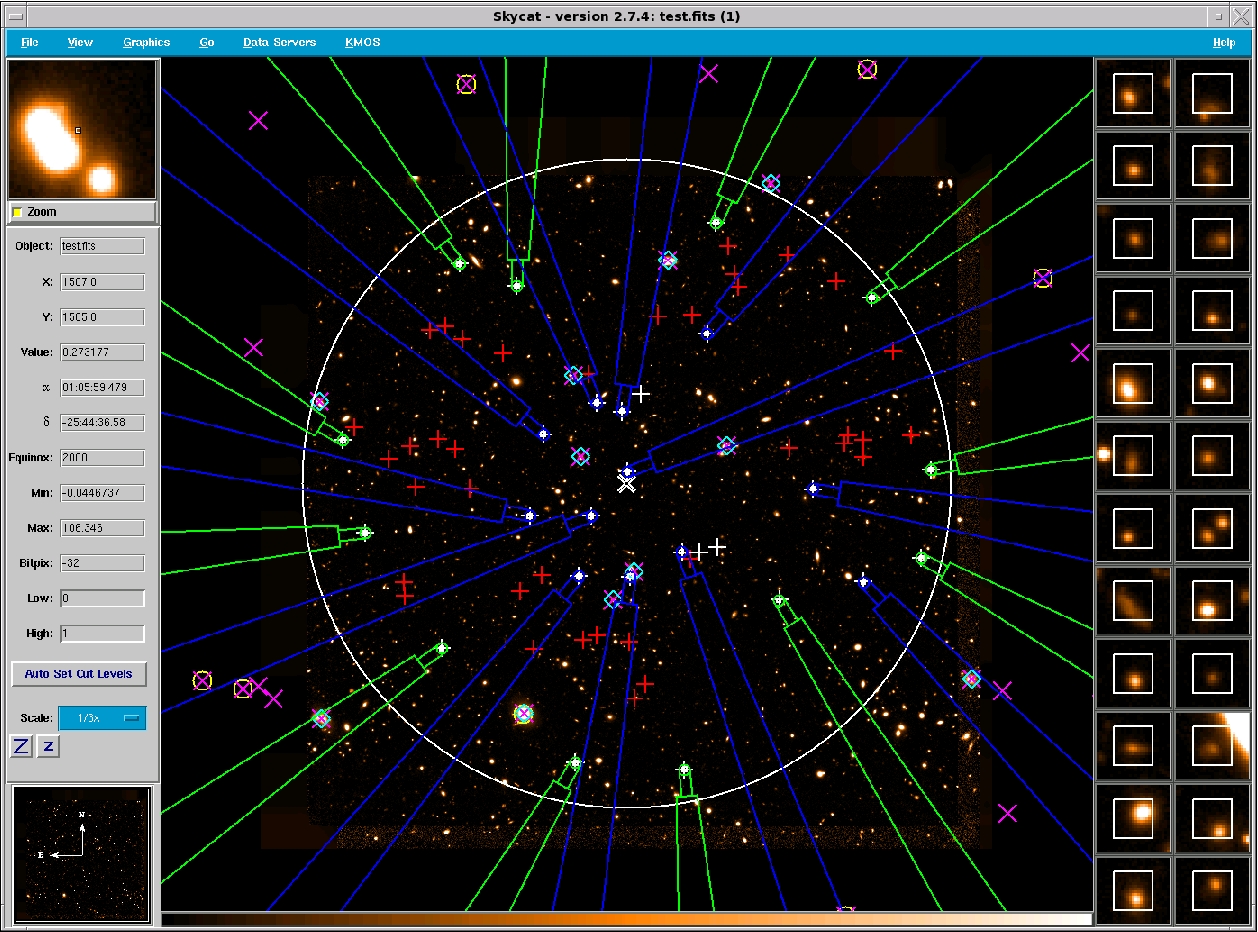
Therefore a dedicated preparation tool KARMA (KMOS ARM Allocation) has been developed, which guides the astronomer through the different steps of observation preparation. As a plugin into the well-known astronomy software package Skycat it provides all its catalogue and image handling capabilities as well as a combined automatic/interactive method of the target-arm assignment. The figure below shows a screenshot of the KARMA/Skycat graphical user interface.
|
| Catching the galaxies: Screenshot of KARMA. All 24 pick-off arms are allocated to faint red objects within the FORS Deep Field. Arms from the upper layer are coloured green, those from the lower layer are coloured blue. The square areas covered by the 24 IFUs can be seen magnified on the right hand side. |
Observation Modes
One of the characteristics of any infrared instrument is that data reduction has to cope with clever sky background subtraction. KMOS provides two different methods of doing this, corresponding to two different observation modes:
|
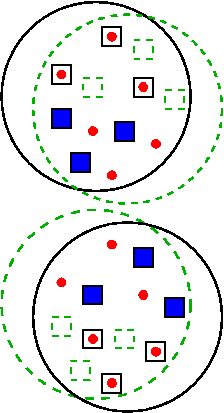
"Nod to Sky" Mode In this mode the sky background signal is obtained by moving ("nodding") the telescope and/or rotating the instrument between two previously defined positions, depicted by the two schematic configurations in the left hand figure. Therefore each pick-off arm (IFU represented schematically by a black square) switches between its scientific target (red bullet) and a corresponding own sky background position (blue square). The latter one has to be found during preparation. In the process of nodding only the telescope and/or instrument rotator positions are altered, the pick-off arm configuration remains unchanged. Since it is very unlikely that all 24 arms can be allocated at once to scientific targets within a single telesope/instrument position it will be possible to assign not used arms to remaining targets in the second position where the already allocated arms are usually covering blank sky. This leads to a configuration where in both telescope/instrument positions (upper and lower figure on the left) one subset of arms is allocated to scientific targets and another subset is allocated to sky background. |
|
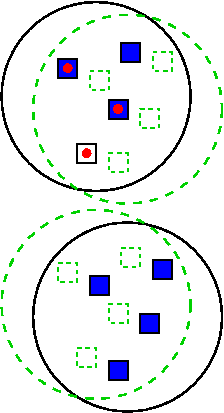
"Stare" Mode The characteristic feature of this mode is that the telescope always points ("stares") to the same position as well as the instrument rotation angle doesn't change (upper part of left hand figure). The sky background then will be obtained by dedicated "sky arms" which, in contrast to the "Nod to Sky Mode", deliver a signal which is picked not by the same IFU as for the scientific target. All pick-off arms allocated to science targets can, however, serve for sky background subtraction simultaneously if their IFUs contain a sufficient number of empty sky pixels. A dedicated sky position where all arms are on blank sky in addition is necessary only once (lower figure). |
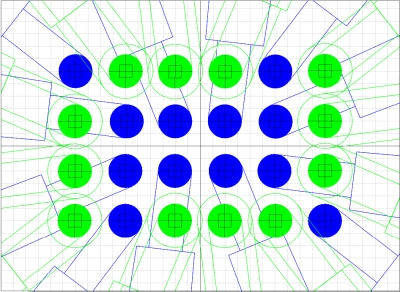
In addition, a special observation mode, known as "Mosaic Mode", is dedicated to the spectroscopy of large contiguous areas. For this purpose a predefined fixed configuration of pick-off arms (see figure below) can be used covering an area of 64x43 arcseconds with 16 successive telescope pointings.
|
Not a board game: The predefined pick-off arm configuration for the Mosaic Mode (upper arms green, lower arms blue). By shifting the telescope both horizontally and vertically within 16 steps a contiguous rectangular field can be covered. |
Last modified: 2022-07-06 (Michael Wegner)