|
|
|
The Instrument Design
Basic Parameters
Derived from the scientific requirements the following detailed technical instrument specifications arise:
| Requirement | Baseline Specification |
|---|---|
| Optical throughput | J > 20%, H > 30%, K > 30% |
| Wavelength coverage | 1.0 ... 2.5μm |
| Spectral resolution | R~3400,3800,3800 (J,H,K) |
| Number of IFUs | 24 |
| Extent of each IFU | 2.8x2.8 arc seconds |
| Spatial sampling | 0.2 arc seconds |
| Patrol field | 7.2 arcmin diameter |
| Close packing of IFUs | >= 3 within 1 arcmin2 |
| Closest approach of IFUs | 6 arc seconds edge-to-edge |
The realisation of these specifications is accomplished following a modular approach which subdivides the instrument into three mainly identical sectors each of which containing one third of the components described below.
Pick-off Arms
|
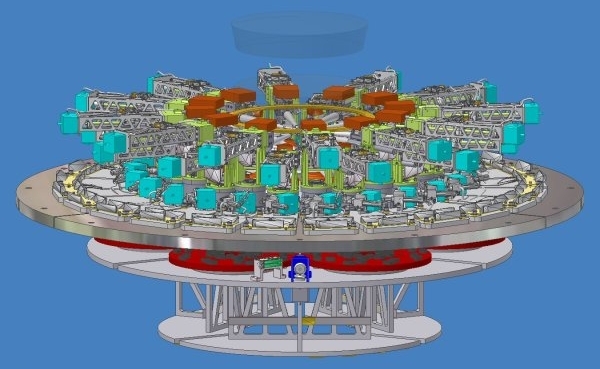
The Pick-off Module: 24 robotic arms are arranged in two layers concentrically around the field of view. |
The heart of KMOS is the so-called Pick-off Module consisting of 24 robotic arms, arranged concentrically around a circular field of view of 25cm diameter (corresponding to 7.2 arcmin on sky). Driven by stepper motors, these arms can perform a linear radial movement up to the centre and have an angular travel of +/- 11 degrees around their rest position, thereby jointly covering the whole field. To avoid an overcrowding of the Pick-off plane with mechanical parts the arms are distributed over two planes with 12 arms each, one located below and the other one above the focal plane. In principal, even then two arms of the same layer still can collide. In case this should happen despite several software permissibilty checks an electronic collision-detection sensor takes care of stopping all arm movements immediately.
With a small fold-mirror at the tip each arm can pick just this 2.8''x2.8'' square field which is resolved into 14x14 spectra by Integral Field Spectroscopy afterwards. The selection of the spectral passband will be accomplished by three filter wheels below the mounting plate for the arms. In addition, a calibration unit offers the possibility to provide the arms at a fixed position with light of defined wavelengths for calibration purposes.
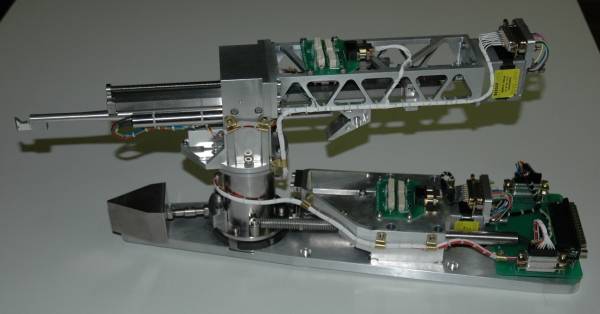
A prototype was already manufactured and can be seen in the figure below.
|
One out of 24: Prototype of a robotic pick-off arm. |
Integral Field Unit Module
Following the general principle of Integral Field Spectroscopy in case of KMOS three identical IFU subsystems each collect the incoming light from 8 pick-off arms, slice it into 8x14 slices (each consisting of 14 spatial pixels) and realigns it to a 254mm long pseudo-slit which in turn feeds one of the three identical spectrographs.
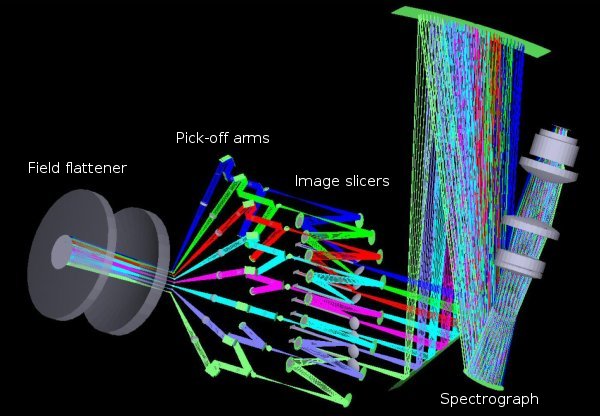
The figure below traces the light beams selected by 8 of the 24 pick-off arms from the entrance lens (left, acts as a field flattener) over the arm optics and the IFU image slicers (centre) down to the spectrograph (right). The latter one obviously gets the already reformatted light after the rearranging process within the IFUs.
|
From image to spectrum: Model of optical paths for beams of incoming light from 8 pick-off arms. |
Spectrograph Module
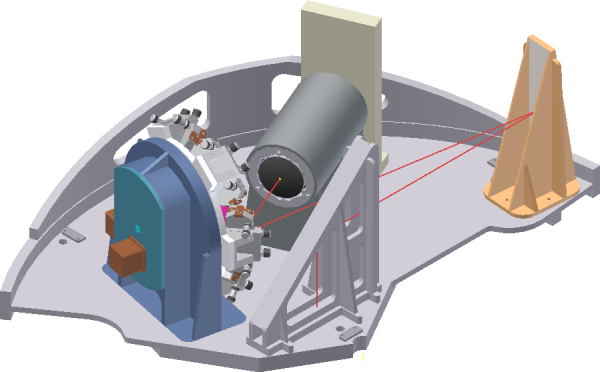
According to the concept of three identical pick-off- and IFU sectors the dispersion of the light incoming from the IFUs will be accomplished also by three identical spectrographs. Each is equipped with a flat fold mirror, a toroidal collimating mirror, a 6-position wheel to select the gratings and the spectrograph camera with a 2048x2048 Hawaii-2RG HgCdTe infrared detector whose position is adjustable.
|
The end: One of the three 3 identical spectrographs with the grating wheel (left) and the camera with infrared detector (centre). The red line illustrates the optical path. |
Cryostat
The peculiarities of infrared astronomy require that KMOS operates in vacuum as well as it must be cooled down to -140°C (the infrared detector down to -200°C). The majority of components therefore is located within an evacuated cryostat (see figure on main page). The total mass of this cryostat and hence the total mass of KMOS will be approximately 3000kg.
Electronics
In order to control and coordinate the hardware devices including more than 60 stepper motors within the cryogenic environment, filter and grating wheels, calibration lamps etc. the necessary electronics infrastructure is organised in 3 Local Control Units (LCUs). A dedicated electronic collision sensor - triggered by electrical contact between the coated surfaces of any two pick-off arms stops all arm activity immediately.
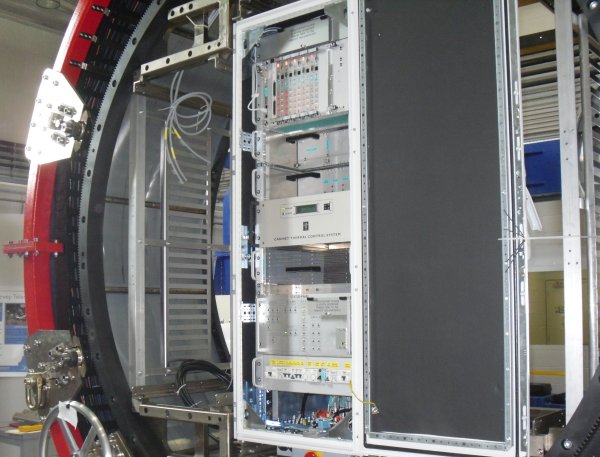
|
Everything under control: One out of three control electronics cabinets mounted to the cable co-rotator. |
Software
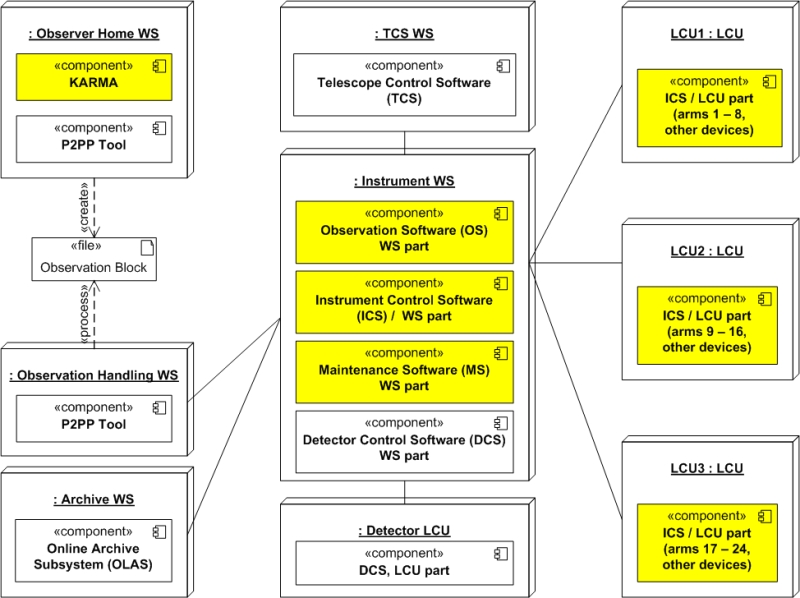
As any instrument operating at the VLT KMOS uses a predefined software framework which is distributed over several Workstations (WSs) and Local Control Units (LCUs). See figure below for an overview over the interacting subsystems.
|
|
Somewhat complex: Deployment of KMOS SW parts to the several executing environments within the VLT software framework. The components developed or modified for KMOS are coloured yellow. |
The instrument-specific software within this framework then is subdivided into the following standard INS modules whereof the following must be adapted and/or rewritten according to the special requirements of KMOS:
- The Instrument Control Software (ICS), consisting of a workstation and a LCU part, controls all hardware devices, especially the pick-off arms, belonging to the instrument.
- The Observation Software (OS) coordinates the execution of an exposure for a given observation mode. It provides high-level coordination tasks controlling the several subsystems but does not interact with any hardware device directly. Additionally, the OS provides the interface for the Archive System. The basic unit to be handled by OS is an Observation Block which contains all parameters necessary for a single observation consisting of target acquisition, exposure and subsequent data archiving. The different sequences of actions are controlled by so-called templates depending on the actual observation mode.
- The Maintenace Software (MS) provides the software control of calibration and test operations.
- The Observer Support Software (OSS) finally enables an instrument-specific preparation of an observation by setting the various unique instrument configuration parameters. In case of KMOS the OSS consists of the so-called KARMA tool which mainly allocates the pick-off arms to scientific targets previously defined in an input catalogue. The standard ESO P2PP (Phase 2 Proposal Preparation) tool is part of OSS and provides the setup facilities for parameters common to all instrument.
According to the common VLT software standards the main parts of the SW are coded in C++ (parts of ICS in C) while the Graphical User Interfaces as well as the templates are implemented by means of the scripting language Tcl/Tk.
In addition to the Instrument Software (developed at USM) a dedicated data reduction pipeline will be provided (by MPE) which must be able to cope with the typical 5 GB data created per observing night.
Last modified: 2022-07-06 (Michael Wegner)